|
 Ёу НУЙФЗЙРЬМЧ ШЏАцПЁМ ШоИгГыРЬЕх ЗЮКПРЬ АјСп СІКёЕЙБт ЕПРлРЛ НЧЧрЧЯАэ РжДй(РЬЙЬСі=MIT) БшЛѓЙш MIT БГМіЦРРЬ ОеРИЗЮ АјСп СІКёЕЙБт, ЕкЗЮ АјСп СІКёЕЙБт, ШИРќ СЁЧС Ею ПЊЕПРћРЮ ЕПРлРЛ НЧЧрЧв Мі РжДТ ШоИгГыРЬЕх ЗЮКП МГАш БтМњРЛ АГЙпЧпДйАэ ЙрЧћДй. MIT БшЛѓЙш БГМі, БшЕПЧі ПЌБИПј Ею ПЌБИЦРРК ДйОчЧб ОЦХЉЗЮЙшЦН ЕПРлРЛ НЧЧрЧв Мі РжДТ ШоИгГыРЬЕх ЗЮКПРЛ МГАшЧЯБт РЇЧи РќПы ОзУпПЁРЬХЭ, ИТУуЧќ ДйРЬГЊИ№ЙЬХЭ(dynamometer), ДйРЬГЛЙЭ ЕПРл АшШЙБт(motion planner), ТјСі СІОюБт(landing controller) ЕюРЛ АГЙпЧпДй. 
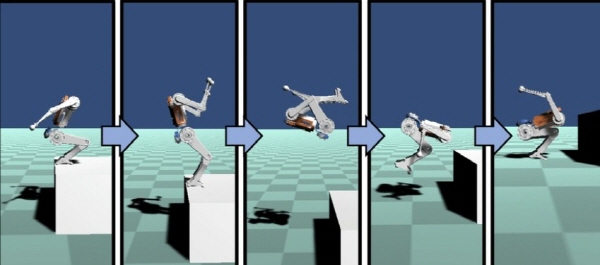
Ёу ШоИгГыРЬЕх ЗЮКПРЧ МГАш(РЬЙЬСі=MIT) 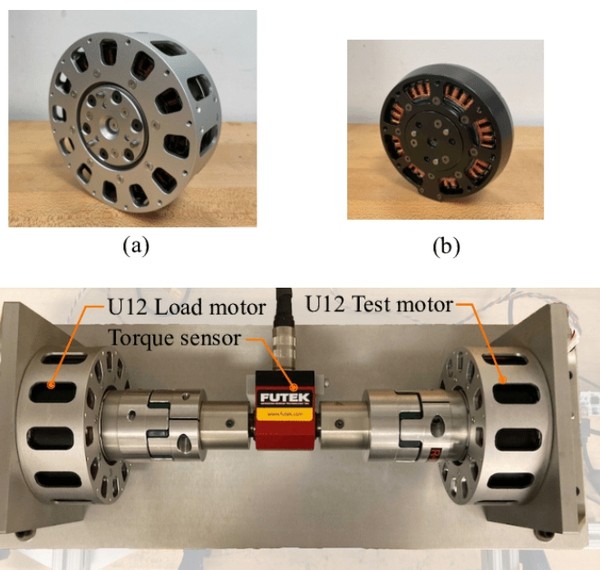
Ёу ОзУпПЁРЬХЭПЭ ДйРЬГЊИ№ЙЬХЭ(ЛчСј=MIT) БшЕПЧі ПЌБИПјРК ХзХЉРЭНКЧУЗЮОюПЁ ЁАРЬЙј ПЌБИПЁМ ПЉЗЏ ОЦХЉЗЮЙшЦН ЕПРлРЛ БИЧіЧв Мі РжДТ ШоИгГыРЬЕх ЗЮКПРЛ ИИЕщ Мі РжДТ НЧСІРћРЮ СІОю ОЫАэИЎСђРЛ АГЙпЧЯБт РЇЧи ГыЗТЧпДй"Ич ЁБИеРњ ОзУпПЁРЬХЭРЧ МКДЩРЛ НЧЧшРћРИЗЮ ШЎРЮЧЯАэ, РЬОю ЕПРл АшШЙБтРЧ СжПфЧб ЧбАшСЁРЛ ЧЅЧіЧпДйЁААэ ЧпДй. ПЌБИЦРРК ЕПРл АшШЙАњ СІОю БтДЩРЛ НЧЧрЧЯИщМ АэЕЕЗЮ ПЊЕПРћРЮ ЗЮКП ЧрЕПАњ АќЗУЕШ СІОр ЛчЧзРЛ УГИЎЧвМі РжДТ ЛѕЗЮПю ЙцЙ§РЛ АГЙпЧпДйАэ ЙрЧћДй. РЬ ЛѕЗЮПю ЙцЙ§ЗаРЛ ШоИгГыРЬЕх ЗЮКП МГАшПЭ ХыЧеЧи КИДй ПЊЕПРћРЮ ЕПРлРЛ МіЧрЧв Мі РжЕЕЗЯ ЧпДйДТ АЭ. ПЌБИЦРРК ЁББтСИ ШоИгГыРЬЕх ЗЮКПАњ РЬЙј ШоИгГыРЬЕх ЗЮКП МГАшРЧ АЁРх ХЋ ТїРЬСЁРК ОзУпПЁРЬХЭПЁ РжДйЁАИч БтСИ ФЁХИ ЗЮКППЁ УЄХУЕЧОњДј ОзУпПЁРЬХЭ БтМњРЛ ШЙБтРћРИЗЮ АГМБЧи ЛѕЗЮПю ШоИгГыРЬЕх ЗЮКП МГАшПЁ ЙнПЕЧпДйАэ ЕЁКйПДДй.
|




